
A Log-Rectilinear Transformation for Foveated 360-degree Video Streaming
360° Video Streaming and Rendering
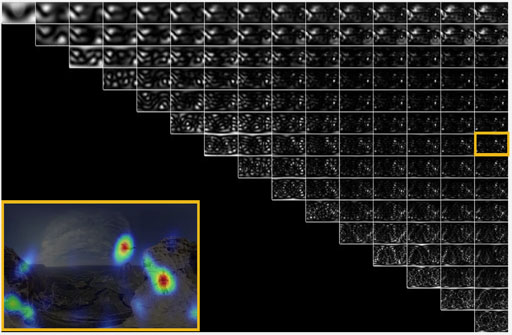
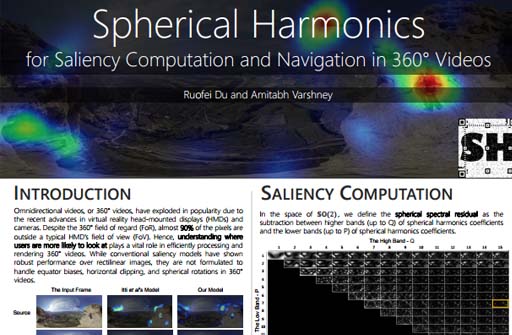
Omnidirectional videos, or 360° videos, have exploded in popularity due to the recent advances in virtual reality head-mounted displays (HMDs) and cameras. Despite the 360° field of regard (FoR), almost 90% of the pixels are outside a typical HMD's field of view (FoV). Hence, understanding where users are more likely to look at plays a vital role in efficiently streaming and rendering 360° videos. While conventional saliency models have shown robust performance over rectilinear images, they are not formulated to handle equatorial bias, horizontal clipping, and spherical rotations in 360° videos. In this paper, we present a novel GPU-driven pipeline for saliency computation and virtual cinematography in 360° videos using spherical harmonics (SH). By analyzing the spherical harmonics spectrum of the 360° video, we extract the spectral residual by accumulating the SH coefficients between a low band and a high band. Our model outperforms the classic Itti et al.'s model in timings by 5\times to 13\times in timing and runs at over 60 FPS for 4K videos. Further, our interactive computation of spherical saliency can be used for saliency-guided virtual cinematography in 360° videos. We formulate a spatiotemporal model to ensure large saliency coverage while reducing the camera movement jitter. Our pipeline can be used in processing, navigating, and streaming 360° videos in real time.
Publications
OmniSyn: Intermediate View Synthesis Between Wide-baseline Panoramas
2022 IEEE Conference on Virtual Reality and 3D User Interfaces (VR), 2022.
Keywords: 360 image, virtual reality, view synthesis, panorama, neural rendering, depth map, mesh rendering, inpainting, digital world

A Log-Rectilinear Transformation for Foveated 360-degree Video Streaming🎖️ TVCG Honorable Mentions
IEEE Transactions on Visualization and Computer Graphics (TVCG), 2021.
Keywords: 360° video, foveation, virtual reality, live video stream-ing, log-rectilinear, summed-area table, eye tracking, digital world
Saliency Computation for Virtual Cinematography in 360° Videos
IEEE Computer Graphics and Applications (CGA), 2021.
Keywords: spherical harmonics, virtual reality, visual saliency, 360°videos, omnidirectional videos, perception, Itti model, spectralresidual, GPGPU, CUDA, eye tracking, interactive graphics
Fusing Multimedia Data Into Dynamic Virtual EnvironmentsPh.D. Dissertation
Ph.D. Dissertation, University of Maryland, College Park., 2018.
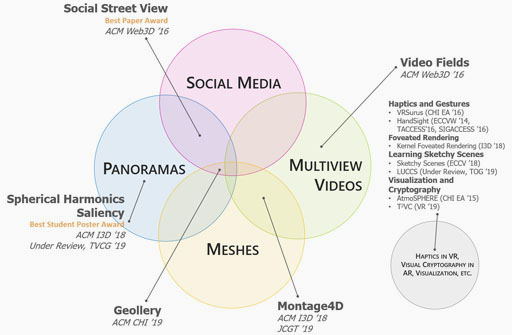
Keywords: social street view, geollery, spherical harmonics, 360 video, multiview video, montage4d, haptics, cryptography, metaverse, mirrored world
A Pilot Study of Spherical Harmonics for Saliency Computation and Navigation in 360° Videos
ACM SIGGRAPH Symposium on Interactive 3D Graphics and Games (I3D), 2018.
Keywords: spherical harmonics, virtual reality, visual saliency, 360°videos, omnidirectional videos, perception, Itti model, spectralresidual, GPGPU, CUDA
Videos
Talks

Networking and System Challenges: Interactive Perception & Graphics for a Universally Accessible XR
Ruofei Du
NSF ImmerCon 2025 , George Mason University, Fairfax, VA.
pdf |

A Log-Rectilinear Transformation for Foveated 360-degree Video Streaming
VR 2021, Remote Talk.
Fusing Multimedia Data Into Dynamic Virtual Environments
Ruofei Du
Ph.D. Dissertation, Talk at Facebook Reality Labs, University of Maryland, College Park, MD..
pdf | source, slideshare | cite
A Pilot Study of Spherical Harmonics for Saliency Computation and Navigation in 360◦ Videos.
Ruofei Du
I3D 2018, Montreal, Quebec, Canada. May 16, 2018..